
Introdução
Nessa aula, falaremos sobre dois tipos de sensores muito importantes na robótica: Acelerômetros e Giroscópios. Ambos têm aplicações quase inesgotáveis e são fundamentais para o funcionamento de parte dos aparelhos do nosso dia a dia. Se você tem um smartphone, é provável que use esses sensores diariamente e nem perceba.
Afinal de contas, o que é cada um deles?
Resumidamente, sensores acelerômetros medem (como o nome sugere) a aceleração de um corpo. Mais especificamente, a aceleração própria, mas falaremos mais sobre isso em breve. Já os sensores giroscópios medem rotação, ou velocidade angular. Não se preocupe, entraremos em mais detalhes em breve.
Acelerômetro
O acelerômetro, como vimos antes, é um dispositivo que mede a aceleração própria de um corpo. Esse tipo de aceleração é aquela percebida por um corpo em seu próprio referencial. Uma outra forma de enxergar isso é imaginar a aceleração desse corpo em relação a outro corpo em queda livre. Assim, um acelerômetro em repouso no chão mede uma aceleração apontando para cima, de módulo g (g ≅ 9,8 m/s²). Caso ainda esteja confuso, isso ficará mais claro se entendermos como esses sensores realizam as medições.
Uma boa forma de entender um acelerômetro é imaginar uma caixa. No interior dessa caixa, fica uma mola, que prende uma pequena massa a uma de suas paredes. Quando a caixa sofre uma aceleração, a massa em seu interior irá comprimir ou esticar a mola. Medindo essa deformação da mola, é possível estimar o valor da aceleração. Claro, isso funciona apenas para um eixo (o da mola).
Na prática, existem várias formas diferentes de medir aceleração, mas a ideia é a mesma. Alguns sensores medem a capacitância de placas que se aproximam, outros usam elementos piezoelétricos (que produzem carga elétrica quando submetidos a estresses mecânicos), entre muitas outras formas.
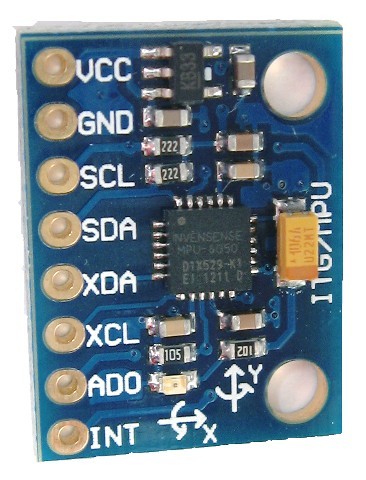
Com as informações fornecidas por um acelerômetro podemos, por exemplo, estimar a posição de um corpo. Integrando a aceleração, conseguimos a velocidade do corpo e, em seguida, podemos integrar a velocidade, obtendo a posição do objeto. Para uma maior precisão, os dados do acelerômetro são, muitas vezes, complementados com os de um giroscópio. Por isso, parte dos sensores compatíveis com arduino vem com as duas funcionalidades integradas (o MPU6050, na figura abaixo, é um bom exemplo).
Giroscópio
O giroscópio pode ser definido como um dispositivo capaz de medir velocidade angular. Caso ainda não esteja familiarizado com essa grandeza, a velocidade angular é a medida da velocidade com que um determinado objeto roda em torno de um eixo (radianos por segundo, por exemplo). Isso é útil em uma série de aplicações, pois nos permite aproximar a orientação espacial de um objeto.
Por exemplo, esse sensor pode ser um “quebra-galho” em um robô para competições do tipo Rescue Maze, onde é necessario percorrer um labirinto. Isso porque, além de ser simples de usar, com ele, é possível verificar a orientação do robô durante uma curva e garantir que ele chegue ao ângulo desejado.
De maneira semelhante à do acelerômetro, podemos integrar a velocidade angular, obtendo assim o ângulo total de rotação em torno do eixo desejado. Compondo os dados dos três eixos possíveis (X, Y e Z), podemos estimar a orientação do objeto que contém o sensor (um celular, por exemplo).
As rotações em relação a cada eixo costumam receber nomes específicos: Yaw, Pitch e Roll. Assim, no exemplo do robô, provavelmente seria mais importante calcular o Yaw, em torno do eixo Z, para controlar o ângulo total de curva.
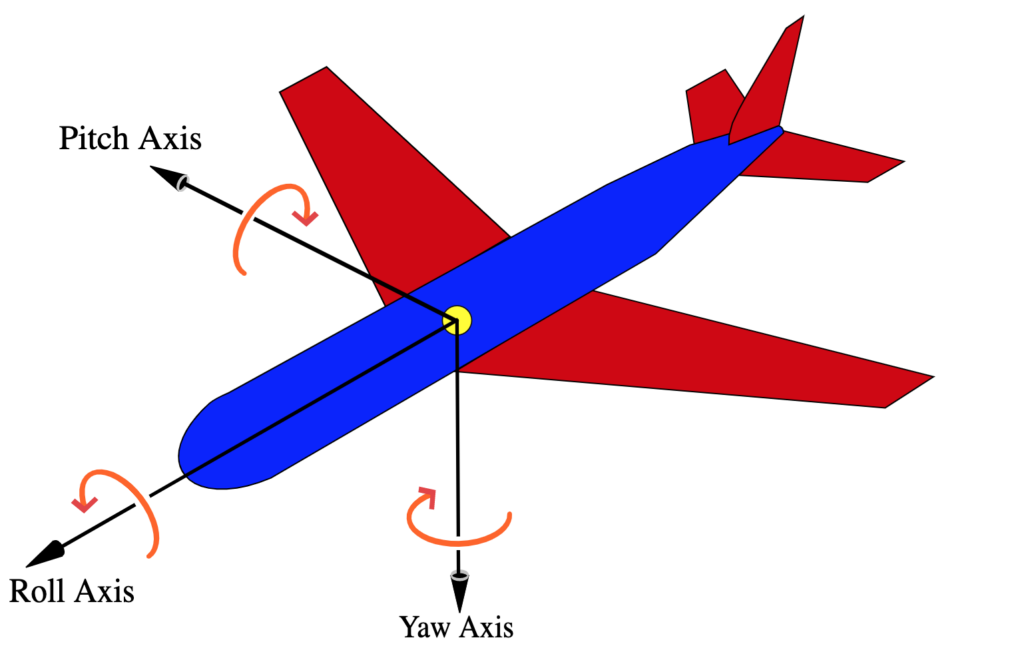
By Yaw_Axis.svg: Auawisederivative work: Jrvz (talk) – Yaw_Axis.svg, CC BY-SA 3.0, https://commons.wikimedia.org/w/index.php?curid=9441238