
Nessa aula você verá como usar um sensor de cor TCS34725 com qualquer Arduino e como obter leituras de dois sensores ao mesmo tempo utilizando o Arduino Due. Utilizaremos como base a biblioteca disponibilizada gratuitamente pela Adafruit.
sobre o TCS34725
Descrição:
Se trata de um sensor de cor bastante preciso, ideal para se utilizar em projetos de robótica por possuir muitos benefícios. Ele se diferencia dos seus concorrentes por possuir um LED de alta intensidade, funcionar tanto com 5v quanto com 3.3v e possuir um filtro IR, tudo isso em uma pequena placa, tornando assim sua leitura de cores mais fiel e condizente com a realidade, além de permitir muitas configurações internas.
Especificações:
- Chip: TCS34725 (datasheet)
- Tensão de operação: 3-5V
- Comunicação: I2C
- Dimensões: (21 x 21)mm
- Peso: 3,23g
Implementando um sensor TCS34725:
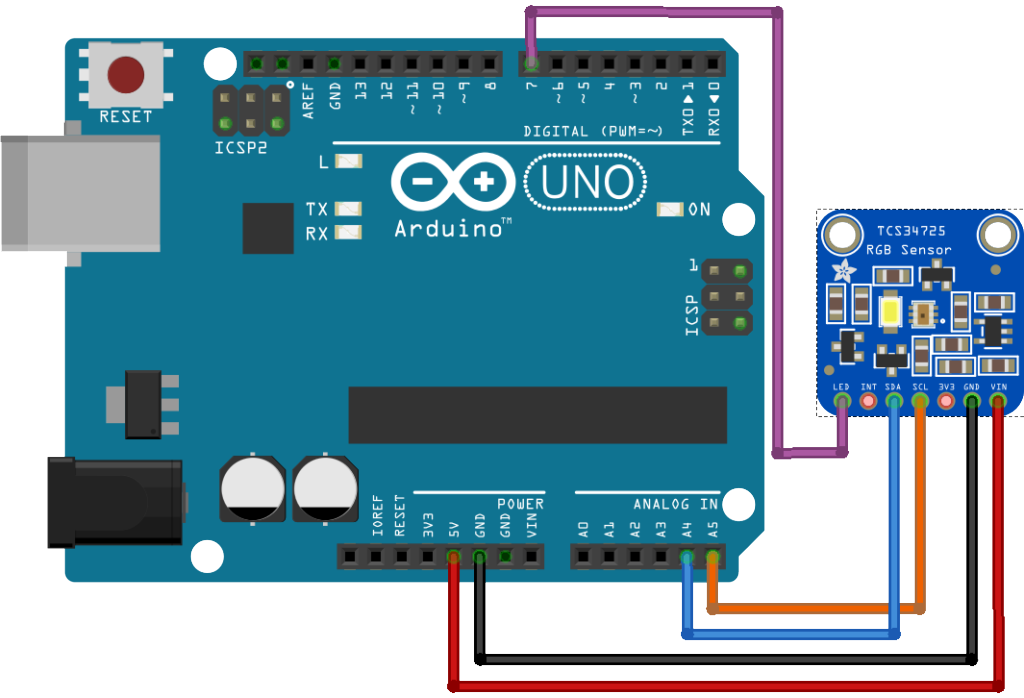
Para esse primeiro exemplo irei usar um Arduino UNO, primeiramente você terá que ligar os pinos do sensor à sua placa Arduino, se precisar siga o esquemático à baixo:
Em seguida você pode abrir a sua IDE, selecionar qual placa você está usando e passar o seguinte código para o seu Arduíno:
Após isso, ainda com seu Arduino conectado, ao abrir o serial monitor você deverá começar a receber os valores lidos pelo sensor, r(Vermelho), g(Verde), b(Azul) e c(claridade), caso não esteja recebendo nada, verifique se seu baud rate(taxa de transmissão de dados) está em 9600, caso esteja e mesmo assim você continuar sem receber nada, procure verificar suas conexões.
Obtendo a leitura simultânea de dois sensores TCS34725 com o Arduino Due:
Caso você deseje utilizar dois sensores TCS34725 simultaneamente com o Arduino Due, utilizando seus 2 barramentos I²C, saiba que é possível, fiz algumas modificações na biblioteca da Adafruit para que seja possível usar o segundo barramento I²C da placa
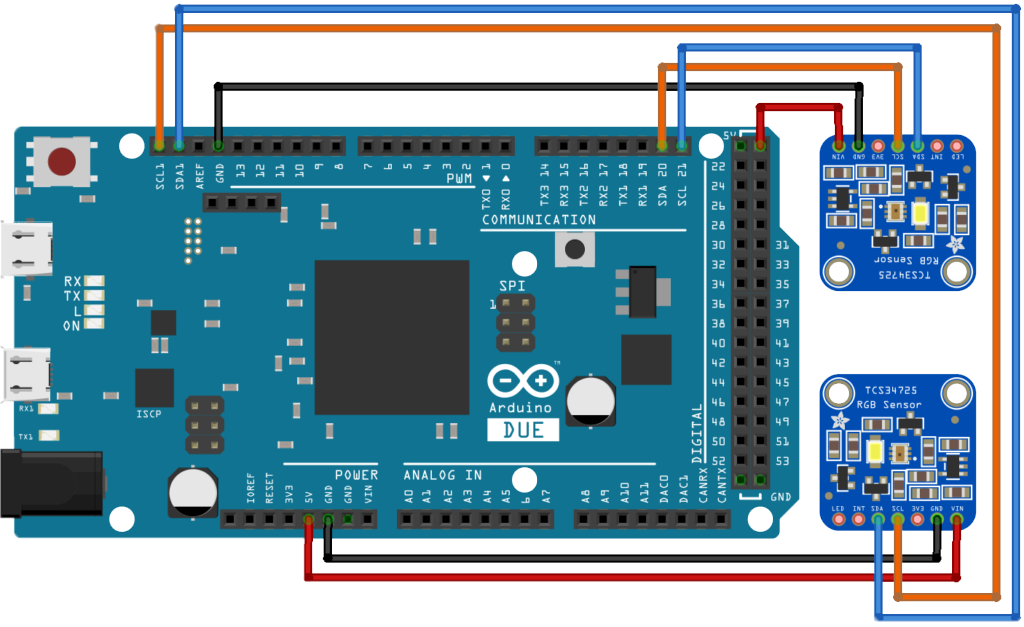
Primeiramente devemos fazer as ligações dos sensores na placa Arduino, você pode seguir o seguinte esquemático:
Depois, baixe e instale em sua IDE a biblioteca que modifiquei e o núcleo da placa Arduíno Due. Para baixar o núcleo, siga o tutorial:
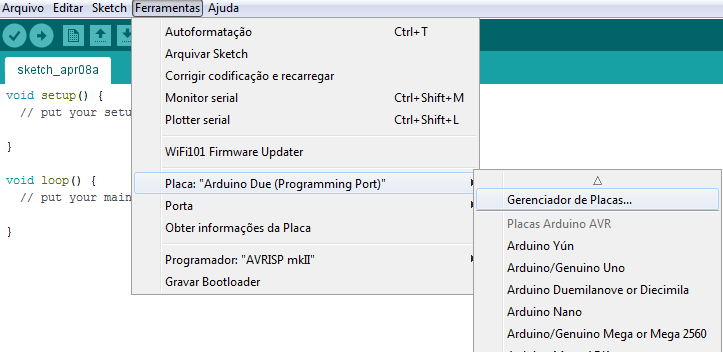
1. Vá em “Ferramentas/Placa” depois clique em “Gerenciador de Placas…”
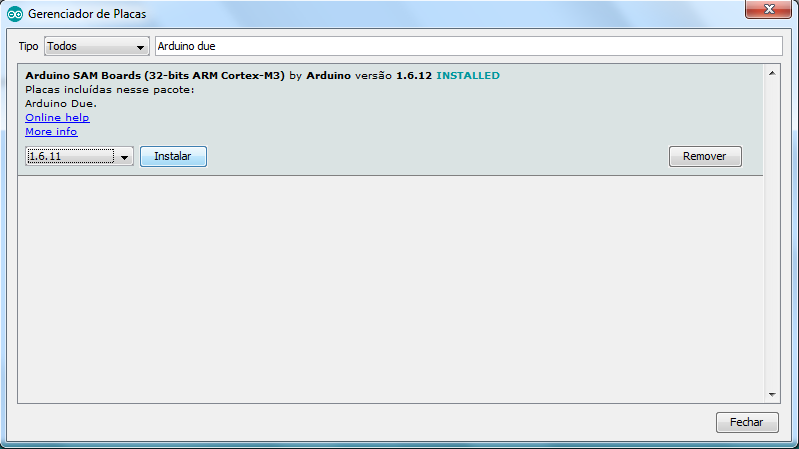
2. Procure por “Arduino Due” e instale a versão mais recente
Após instalado use esse código como exemplo: